Change lamp light direction
We present RoboGen, a generative robotic agent that automatically learns diverse
robotic skills at scale via generative simulation. RoboGen leverages the latest
advancements in foundation and generative models. Instead of directly using or
adapting these models to produce policies or low-level actions, we advocate for
a generative scheme, which uses these models to automatically generate diversified tasks, scenes, and training supervisions, thereby scaling up robotic skill
learning with minimal human supervision. Our approach equips a robotic agent
with a self-guided propose-generate-learn cycle: the agent first proposes interesting tasks and skills to develop, and then generates corresponding simulation
environments by populating pertinent objects and assets with proper spatial configurations. Afterwards, the agent decomposes the proposed high-level task into
sub-tasks, selects the optimal learning approach (reinforcement learning, motion
planning, or trajectory optimization), generates required training supervision, and
then learns policies to acquire the proposed skill. Our work attempts to extract the
extensive and versatile knowledge embedded in large-scale models and transfer
them to the field of robotics. Our fully generative pipeline can be queried repeatedly, producing an endless stream of skill demonstrations associated with diverse
tasks and environments.
RoboGen is simulated and rendered with Genesis, a multi-material multi-solver generative simulation engine for general-purpose robot learning.
Please select an image below to view the results.
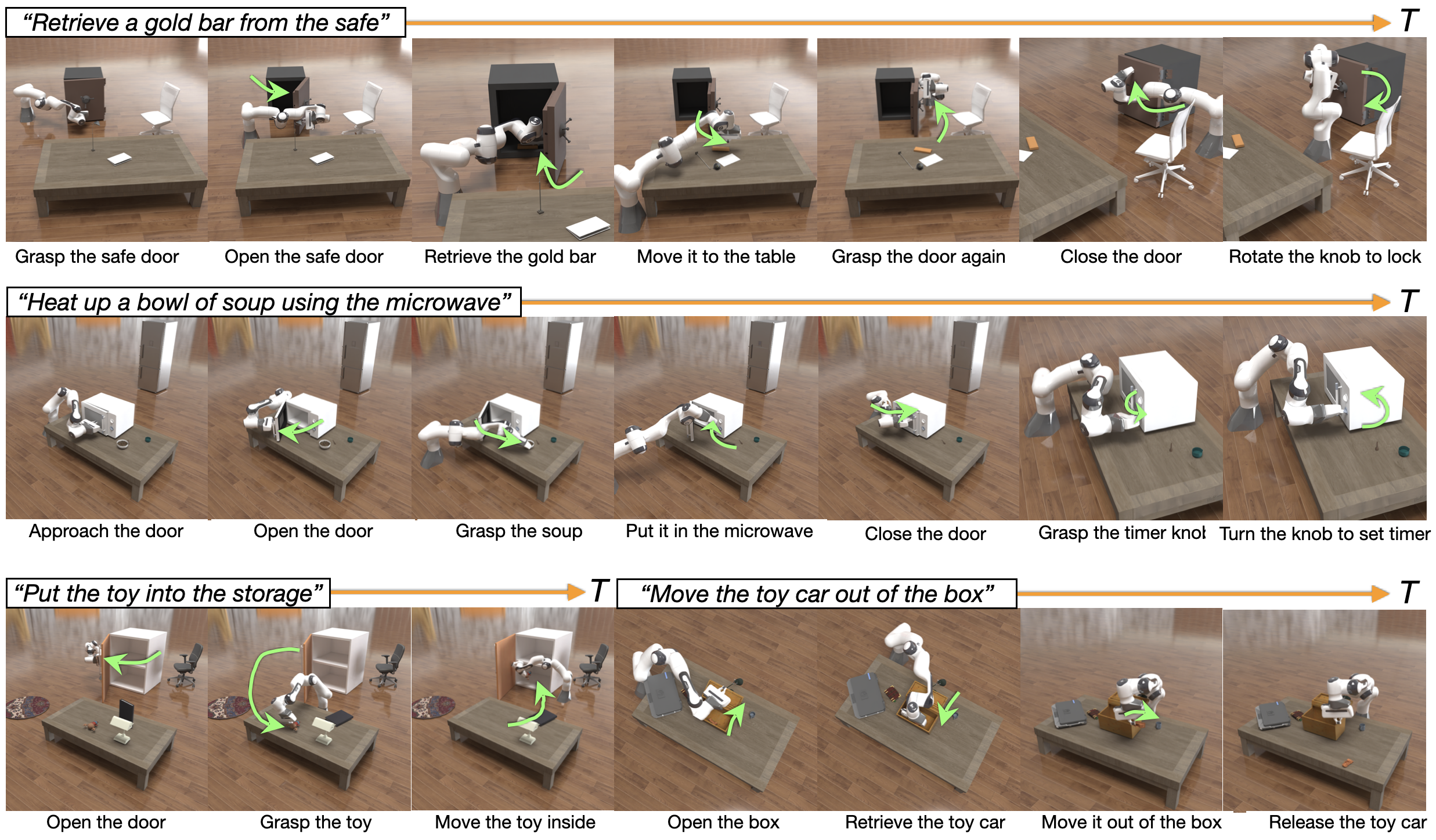
![<b>store an item into the storagefurniture</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/store_an_item_into_the_storagefurniture.txt](videos/task_store_an_item_into_the_storagefurniture_2023-10-05-00-26-46.png)
![<b>Heat up a bowl of soup in microwave</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Heat_up_a_bowl_of_soup_in_microwave.txt](videos/task_Heat_up_a_bowl_of_soup_in_microwave_2023-10-05-02-51-38.png)
![<b>Slide Window Halfway</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Slide_Window_Halfway.txt](videos/task_Open_Window_Halfway_2023-10-05-00-47-41.png)
![<b>Gallop</b>, RoboGen Results:
[sep]
assets/robogen_results/locomotion_gallop.txt](videos/2023-10-07-18-37-30_a1_run_at_3_-61.125.png)
![<b>Rotate in place</b>, RoboGen Results:
[sep]
assets/robogen_results/locomotion_rotate_in_place.txt](videos/2023-10-09-03-07-40_atlas_spin_right_-145.235.png)
![<b>retrieve an item from safe</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/retrieve_an_item_from_safe.txt](videos/task_retrieve_an_item_from_safe_2023-10-05-00-31-31.png)
![<b>Unload Objects from Cart</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Unload_Objects_from_Cart.txt](videos/task_Unload_Objects_from_Cart_2023-10-05-22-36-46.png)
![<b>Change Lamp Direction</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Change_Lamp_Direction.txt](videos/task_Change_Lamp_Direction_2023-10-08-02-54-38.png)
![<b>Retrieve item from box</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Retrieve_item_from_box.txt](videos/task_Retrieve_item_from_box_2023-10-06-02-47-42.png)
![<b>store food in refrigerator</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/store_food_in_refrigerator.txt](videos/task_store_food_in_refrigerator_2023-10-07-19-42-17.png)
![<b>jump up</b>, RoboGen Results:
[sep]
assets/robogen_results/locomotion_jump.txt](videos/2023-10-08-18-43-13_anymal_jump_-1041.067.png)
![<b>Extend Suitcase Handle</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Extend_Suitcase_Handle.txt](videos/task_Extend_Suitcase_Handle_2023-10-05-00-35-37.png)
![<b>Pull Lever to Start Coffee Brewing</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Pull_Lever_to_Start_Coffee_Brewing.txt](videos/task_Pull_Lever_to_Start_Coffee_Brewing_2023-10-09-03-39-55.png)
![<b>Flush the Toilet</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Flush_the_Toilet.txt](videos/task_Flush_the_Toilet_2023-10-06-03-20-55.png)
![<b>Close laptop lid</b>, RoboGen Results (scene configuration, task decomposition and supervisions):
[sep]
assets/robogen_results/Close_Laptop_Lid.txt](videos/task_Rotate_Laptop_Screen_2023-10-05-00-32-43.png)
![<b>Flip leftwards</b>, RoboGen Results:
[sep]
assets/robogen_results/locomotion_flip_leftwards.txt](videos/2023-10-07-22-04-04_a1_flip_leftward_-2207.387.png)
RoboGen response shown within code block.Change lamp light direction
Pull lever to start coffee brewing
Store the toy into the storage
Stand upright and walk forward using only hind legs
Bend noodle into a U-shape
Open stapler lid
Jump up
Retrieve the gold bar from safe
Flatten the rice ball
Do a headstand
Uncover trashcan lid
Close the drawer of the table
Heat up a bowl of soup in microwave
Kick the soccer ball to the left
Fold the chair
Spin clockwise without right hind foot touching the ground
Walk forward
Retrieve the toy car from box
Jump backward
Flip leftward
Slide in table drawer
Do a headstand
Store the apple in refrigerator
Lift up toilet lid
Set the clock back by 5 minutes
Flip backward
Take jumps forward
Throw trash away
Walk backward
Lie face down and cawl forward
Do a headstead
Slide window halfway
Load dish into dishwasher
Stay balanced and move forward
Climp up the stairs
Run forward fast
Open microwave door
Arrange three different cans in a row
Walk backward
Unload the milk from cart
Open the door of trash can
Pull drawer out
Take out a bottle of water from fridge
Tilt display screen
Flip rightward
Flip rightward
Press and rotate dispenser lid
Put a book in the drawer
Cut the dough in half
Rotate globe horizontally
Collapse chair
Turn on faucet
Store a toy inside the box
Close dispenser lid
Flip backward
Turn off faucet
Jump as high as possible
Put an toy into the storage
Direct and press dispenser
Flip forward
Do a backflip
Lift up kettle lid
Kick the soccer ball to the left
Crawl forward
Flush the toilet
Open washing machine door
Raise laptop screen
Activate water faucet
Slide both windows
Rotate fan rotor
Open fridges freezer door
Twist kettle handle
Open oven door
Jump higher than 5 meters
Spin left without using right hind leg
Flip forward
Run backward fast using only front and left hind legs
Take a big jump backward
Pull out the top drawer of the cabinet
Press the button to turn on the printer
Close trashcan lid
Run forward
Shut toilet lid
Push the ball forward
Open box lid halfway
Push the ball forward
Wrap the dumpling wrapper
Lift box lid
Spin leftward
Crawl backward at 1m/s
Start dishwasher by pressing the start button
Opening both refrigerator doors
Shape the dough into a baguette
Jump over the hurdle
Close window
Slide down display screen
Put a fruit into a fruit bowl
Jump and kick the basketball
Turning on coffee machine using the knob
Turn rightward continuously
Flip forward
Open door
Kick the soccer ball to the right
Extend suitcase handle
Spin clockwise
Lift up the dumpling
Stand upright on two hind legs
Spin clockwise
Rotate bucket handle
Draw out drawer
Do a backflip and kick the soccer ball to the right
Remove pot lid
Close laptop screen
Roll out the doll
Spin counter-clockwise
Close door
Put filling onto the wrapper
Turn on lamp by pressing the toggle button
Move clock ahead for daylight saving
Shut the oven door
@misc{wang2023robogen,
title={RoboGen: Towards Unleashing Infinite Data for Automated Robot Learning via Generative Simulation},
author={Yufei Wang and Zhou Xian and Feng Chen and Tsun-Hsuan Wang and Yian Wang and Katerina Fragkiadaki and Zackory Erickson and David Held and Chuang Gan},
year={2023},
eprint={2311.01455},
archivePrefix={arXiv},
primaryClass={cs.RO}
}